 ช้างเผือก
ช้างเผือก
Categories
Statistics
Since 08.08.2014
Counts only, if "DNT = disabled".
216.73.216.253
216.73.216.253
Counts only, if "DNT = disabled".
216.73.216.253
216.73.216.253
Info

เราจะทำแบบวิศวกรผู้ยิ่งใหญ่

27. July 2026
YOUR OPINION •••
average: 1.000, n: 1

When using this form, your ip is stored in order to avoid multiple voting on the same website. That's it.
When using this form, your ip is stored in order to avoid multiple voting on the same website. That's it.
เราจะทำแบบวิศวกรผู้ยิ่งใหญ่
Arduino-Shield-ULTRAMOD.php 30810 Bytes 17-07-2018 16:54:09
Arduino/Genuino 9.9 MHz ... 3.2 GHz Synthesiser
Shield "ULTRAMOD", based on the Si564 from SiLabs
This is a shield to evaluate the performance of the Silicon Labs Si564 Synthesiser. Together with a rotary encoder,
an OLED display, an attenuator and some amplifying, this forms a fully functional synthesiser. And yes, we use
the homebrewer - friendly 7 x 5 mm version :-)
FREQUENCY RANGE | 9.9 MHz ... 3.2 GHz (with gap 2.6 - 2.7 GHz) |
FREQUENCY RESOLUTION | 1 Hz |
FREQUENCY ACCURACY | - 2.8125 ppm (room temperature) |
OUTPUT POWER | 0 dBm ... + 13 dBm (in 0.5 dB steps) |
POWER SUPPLY | 7.5 V, 800 mA |
✈ The building Blocks • Functional Description
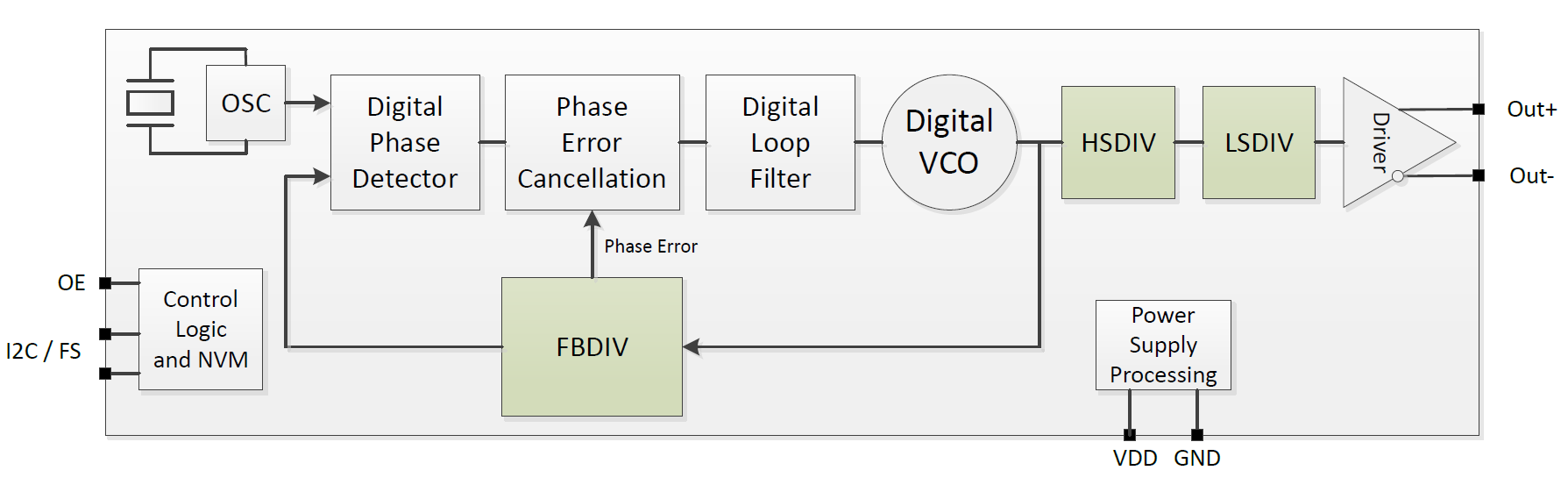
The building Blocks of the Si564 - Drawing courtesy of Silicon Labs
The Si564 consists of an fractional pll with a vco running from 10.8 - 13.12 GHz (A Grade). With a selecteable output divider (HSDIV and LSDIV), the Output Frequency spans from 200 kHz up to 3 GHz. As we use an amplifier in our design, the biasing inductor limits the lower cutoff frequency to about 10 MHz (TCBT-14). This also ensures, that the minimum Frequency is above 6.4 MHz and therefore, the LSDIV can be kept at 1 (or 0x00).
The outputs of the Si564 (LVPECL) are combined with an TCM1-83x-1+ from Mini Circuits and then attenuated (in order to adjust the RF-Level) and then amplified by an GALI2+ (16 dB, 13 dBm, 40 mA)
Finally, the signal passes an attenuator SKY12347-362LF from Skyworks. From the available 31.5 dB attenuation range, approx. 20 dB are used for equalisation and the rest is available for attenuation. Therefore, we expect an amplitude in the range of +10 dBm down to 0 dBm.
As this "thing" provides an ultra-low jitter and has a low phase noise clock at any output frequency, it is ideally suited to drive an AOM (Acousto-Optic Modulator).
Our Quantum - Opticians are excited :-)
"The device is user-programmed via simple I2C commands to provide any frequency from 0.2 to 3000 MHz with <1 ppb resolution and maintains exceptionally low jitter for both integer and fractional frequencies across its operating range. The Si564 offers excellent reliability and frequency stability as well as guaranteed aging performance. On-chip power supply filtering provides industry-leading power supply noise rejection, simplifying the task of generating low jitter clocks in noisy systems". (Says the datasheet of the Si564).
The Si564 consists of an fractional pll with a vco running from 10.8 - 13.12 GHz (A Grade). With a selecteable output divider (HSDIV and LSDIV), the Output Frequency spans from 200 kHz up to 3 GHz. As we use an amplifier in our design, the biasing inductor limits the lower cutoff frequency to about 10 MHz (TCBT-14). This also ensures, that the minimum Frequency is above 6.4 MHz and therefore, the LSDIV can be kept at 1 (or 0x00).
The outputs of the Si564 (LVPECL) are combined with an TCM1-83x-1+ from Mini Circuits and then attenuated (in order to adjust the RF-Level) and then amplified by an GALI2+ (16 dB, 13 dBm, 40 mA)
Finally, the signal passes an attenuator SKY12347-362LF from Skyworks. From the available 31.5 dB attenuation range, approx. 20 dB are used for equalisation and the rest is available for attenuation. Therefore, we expect an amplitude in the range of +10 dBm down to 0 dBm.
As this "thing" provides an ultra-low jitter and has a low phase noise clock at any output frequency, it is ideally suited to drive an AOM (Acousto-Optic Modulator).
Our Quantum - Opticians are excited :-)
"The device is user-programmed via simple I2C commands to provide any frequency from 0.2 to 3000 MHz with <1 ppb resolution and maintains exceptionally low jitter for both integer and fractional frequencies across its operating range. The Si564 offers excellent reliability and frequency stability as well as guaranteed aging performance. On-chip power supply filtering provides industry-leading power supply noise rejection, simplifying the task of generating low jitter clocks in noisy systems". (Says the datasheet of the Si564).
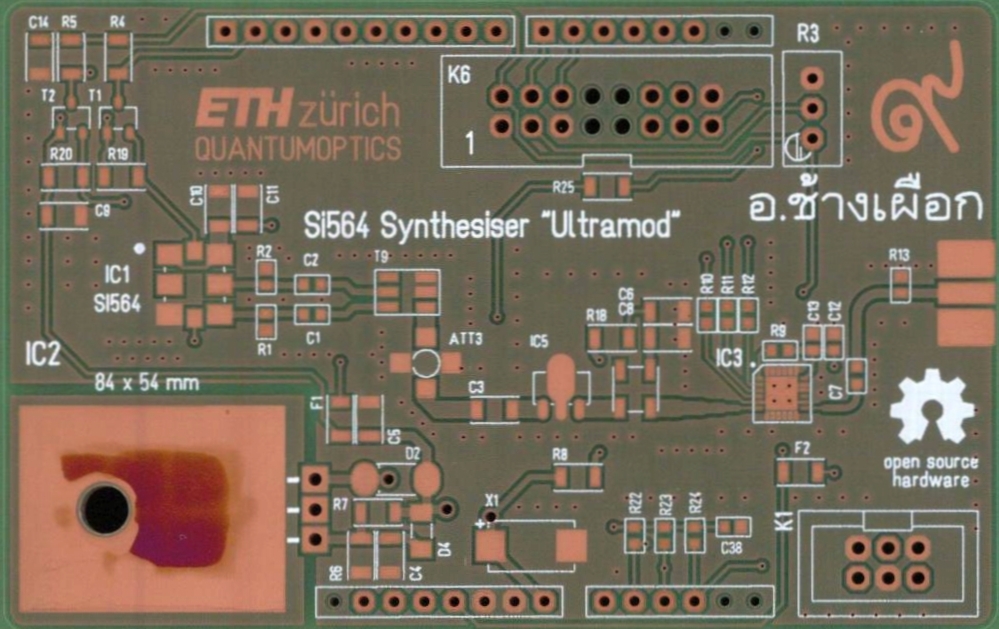
The PCB of this nifty device. Keep it simple was the order of the day ...
The level-shifter (topleft corner) is only used in a 5 V system. When using an Arduino™ Due or Genuino™ Due, a bridge is inserted.
As our valued customers always demand for high power, we added a ZX60-43-S+ (from Mini Circuits) at the output.
Due to the nature of this design, a lot of harmonics are generated. It is wise to foresee a lowpass filter for your application.
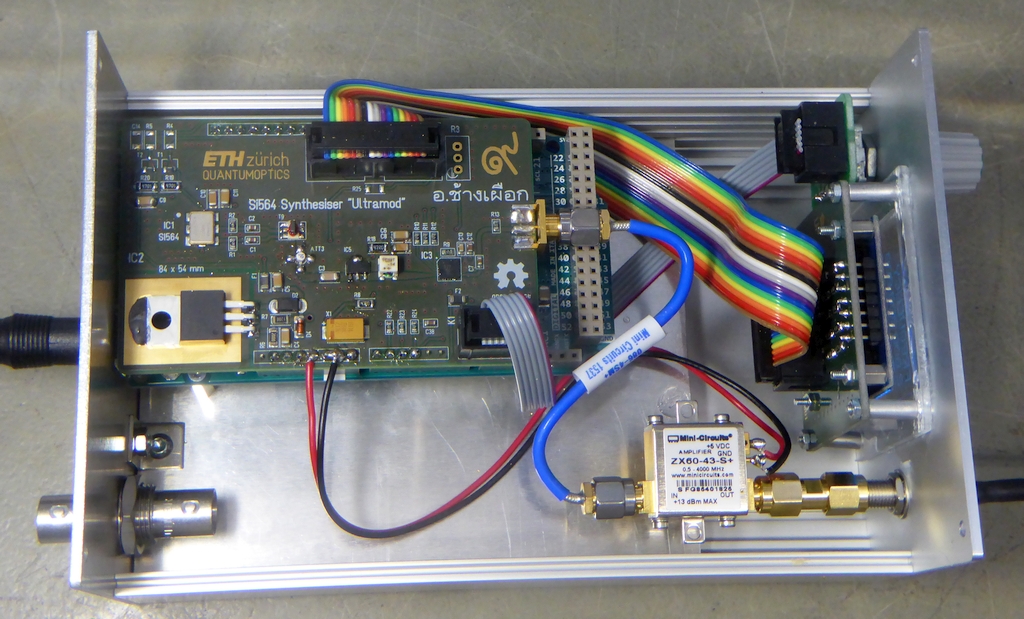
View inside. A ZX60-43-S+ is addesd to have "some" more power.
The level-shifter (topleft corner) is only used in a 5 V system. When using an Arduino™ Due or Genuino™ Due, a bridge is inserted.
As our valued customers always demand for high power, we added a ZX60-43-S+ (from Mini Circuits) at the output.
Due to the nature of this design, a lot of harmonics are generated. It is wise to foresee a lowpass filter for your application.
View inside. A ZX60-43-S+ is addesd to have "some" more power.
✈ Performance
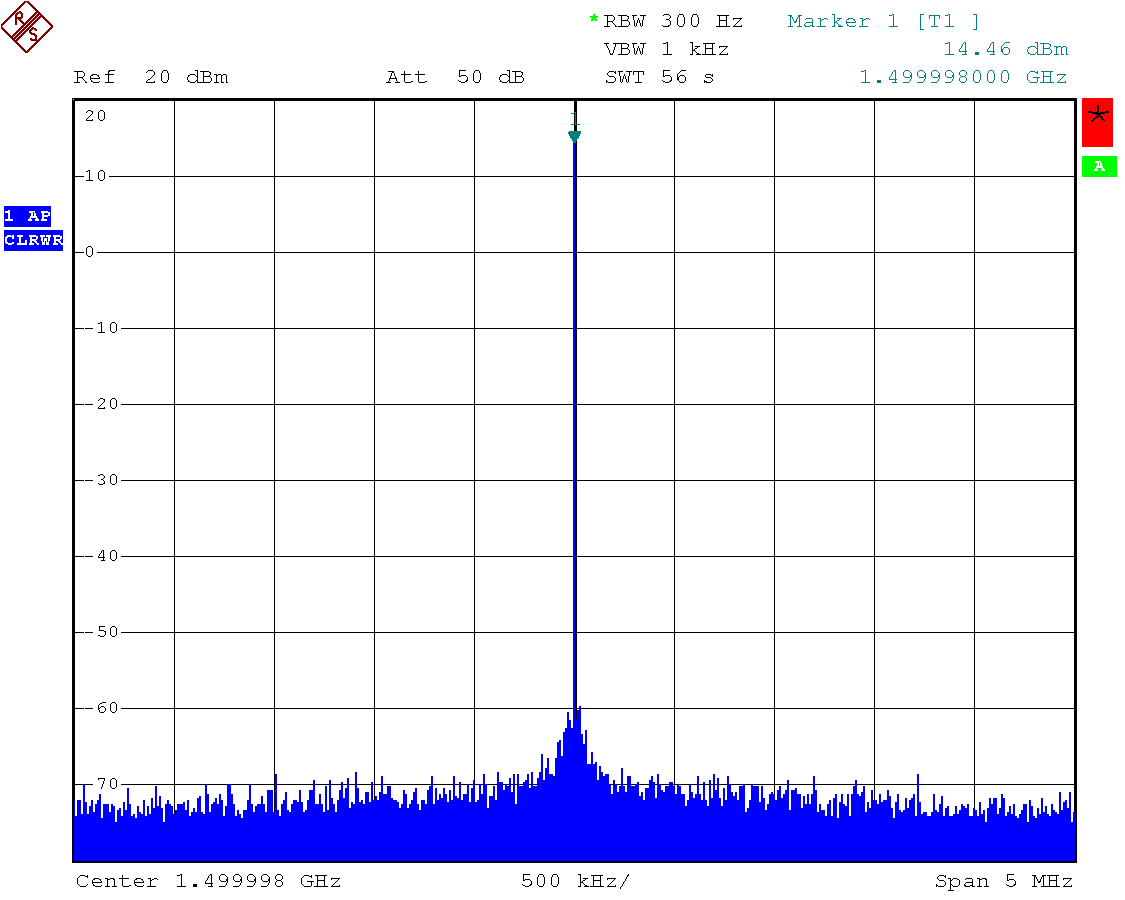
Spectrum at 1500 MHz, + 13 dBm
The spectrum looks very clean, even so we have a fractional pll, there are no spurious artefacts visible. (Maybe we should reduce the RBW :-)
The frequency accuracy was - 2.8125 ppm (measured at 3.2 GHz) at room temperature. If you want to improve this, the chip has to be cooled down (in order to get the frequency up). You may also want to measure the temperature (close to the chip) and introduce some calibration factor in your frequency calculation.
It is also very likely, that a frequency error was introduced by a rounding error on the LSB of the fractional part ...
✈ Downloads





✈ Arduino Sketch - The Code
Double click on code to select ...
/* //////////////////////////////////////////////////////////////////
ARDUINO/Genuino (DUE) Si564 Evaluation Board - "Ultramod Synthesizer"
https://changpuak.ch/electronics/Arduino-Shield-ULTRAMOD.php
Software Version 2.0
29.09.2018 by ALEXANDER SSE FRANK
NOTE: USE ARDUINO DUE TO HAVE 64 BIT PRECISION
NOTE: WE USE WIRE1 HERE !
NOTE: YOU HAVE TO CHANGE hardware/arduino/sam/libraries/Wire/Wire.h
THE NEW VALUE OF TWI_CLOCK = 400000;
AS DESCRIBED HERE : http://forum.arduino.cc/index.php?topic=137588.0
////////////////////////////////////////////////////////////////// */
// OLED 128x64 with SH1106 Controller
// E.G. DM-OLED13-625
#define OLED_MOSI 4
#define OLED_CLK 3
#define OLED_DC 6
#define OLED_CS 7
#define OLED_RESET 5
// STATE OF THE ROTARY ENCODER
const int RE2 = A3 ; // PRESSED
const int RE1 = A2 ;
const int RE0 = A1 ;
unsigned int RE_now = 0;
unsigned int RE_old = 0;
unsigned int RE_xor = 0 ;
unsigned int RE_one = 0 ;
unsigned int RE_two = 0 ;
unsigned int RE_eval = 0x0 ; // 0 = LEFT(-), 1=RIGHT(+), 2=PRESSED
unsigned long RE_time0 = 0 ;
unsigned long RE_time1 = 0 ;
unsigned long RE_time2 = 0 ;
unsigned long StartMilli ;
unsigned long DurationMilli ;
boolean PressedLong = false ;
// SI564 VARIABLES / CONSTANTS
unsigned long long F_VCO_MIN = 10800000000 ;
unsigned long long F_VCO_MAX = 13122222022 ;
unsigned long long F_OUT_MIN = 19999999 ;
unsigned long long F_OUT_MAX = 2500000001 ;
unsigned long long F_OUT = 2000000000 ;
float FREQ = 0.0 ; // FOR DISPLAY
const byte Si564_Address = 0x55 ;
// ATTENUATOR SKY12347-362LF
const int LE = 10 ;
const int CLK = 8;
const int DAT = 9;
float AMPL_MAX = 13.0 ;
float AMPL_MIN = AMPL_MAX - 17.5 ;
// 31.5 is total attenuator range
// 14 dB is slope compensation
// REMAINING 17.5 dB
float AMPL_EXT = 0.0 ; // dB
float LACT = 7.0 ; // LEVEL ACTUAL
float CAL[27];
// Menue Item to be displayed
unsigned int MenueItem = 0 ;
unsigned int ActiveDisplay = 0 ; // FREQUENCY
boolean ShowCursor = true ;
unsigned int CursorPosition = 1 ;
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SH1106.h>
Adafruit_SH1106 display(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
#if (SH1106_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SH1106.h!");
#endif
void setup()
{
delay(1999);
// KNOB - ROTARY ENCODER
pinMode(RE2, INPUT_PULLUP);
pinMode(RE1, INPUT_PULLUP);
pinMode(RE0, INPUT_PULLUP);
Serial.begin(115200);
Wire1.begin();
pinMode(LE, OUTPUT);
pinMode(CLK, OUTPUT);
pinMode(DAT, OUTPUT);
digitalWrite(LE, HIGH);
// THIS IS THE CALCULATED ATTENUATION
// TO HAVE -20dBm AT INPUT OF THE GALI-2
// AN EXTERNAL AMPLIFIER IS USED
CAL[0] = 14.19 ; // AT 20.0 MHz
CAL[1] = 14.0 ; // AT 100 MHz
CAL[2] = 14.0 ; // AT 200 MHz
CAL[3] = 13.70 ; // AT 300 MHz
CAL[4] = 13.40 ; // AT 400 MHz
CAL[5] = 13.30 ; // AT 500 MHz
CAL[6] = 13.1 ; // AT 600 MHz
CAL[7] = 12.5 ; // AT 700 MHz
CAL[8] = 12.0 ; // AT 800 MHz
CAL[9] = 11.35 ; // AT 900 MHz
CAL[10] = 10.7 ; // AT 1000 MHz
CAL[11] = 9.70 ; // AT 1100 MHz
CAL[12] = 8.90 ; // AT 1200 MHz
CAL[13] = 8.0 ; // AT 1300 MHz
CAL[14] = 7.10 ; // AT 1400 MHz
CAL[15] = 6.20 ; // AT 1500 MHz
CAL[16] = 5.3 ; // AT 1600 MHz
CAL[17] = 4.6 ; // AT 1700 MHz
CAL[18] = 3.9 ; // AT 1800 MHz
CAL[19] = 3.1 ; // AT 1900 MHz
CAL[20] = 2.4 ; // AT 2000 MHz
CAL[21] = 1.8 ; // AT 2100 MHz
CAL[22] = 1.2 ; // AT 2200 MHz
CAL[23] = 0.7 ; // AT 2300 MHz
CAL[24] = 0.0 ; // AT 2400 MHz
CAL[25] = 0.0 ; // AT 2500 MHz
CAL[26] = 0.0 ; // AT 2600 MHz
UpdateFreq(F_OUT);
SetRFLevel(LACT, F_OUT);
// INIT OLED
display.begin(SH1106_SWITCHCAPVCC);
// SHOW STARTUP SCREEN
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("Ultramod");
display.setTextSize(1);
display.setCursor(0,21);
display.println("AN UHF SYNTHESISER");
display.setCursor(0,33);
display.println("BASED ON THE SI 564");
display.setCursor(0,45);
display.println("(C) ETH QUANTUMOPTICS");
display.setCursor(0,57);
display.println("BUILT 31.07.2018");
display.display();
delay(9999);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("Ultramod");
display.setTextSize(1);
display.setCursor(0,21);
display.println("FIRMWARE WRITTEN BY");
display.setCursor(0,33);
display.println("MR. JOEL STEINEMANN");
display.setCursor(0,45);
display.println("MR. MIRCO DILL");
display.setCursor(0,57);
display.println("MR. ALEXANDER FRANK");
display.display();
delay(9999);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("Ultramod");
display.setTextSize(1);
display.setCursor(0,21);
display.println("HARDWARE DESIGNED BY");
display.setCursor(0,33);
display.println("MR. ALEXANDER FRANK");
display.setCursor(0,45);
display.println("MR. MANUEL LOPEZ");
display.setCursor(0,57);
display.println("MR. TILMAN ESSLINGER");
display.display();
delay(9999);
}
void loop()
{
switch (MenueItem)
{
case 0:
ShowFrequencyMenue() ;
ActiveDisplay = 0 ;
MenueItem = 2 ;
UpdateFreq(F_OUT);
// MAYBE THE NEW FREQUENCY DEMANDS AN AMPLITUDE CORRECTION
SetRFLevel(LACT, F_OUT);
break;
case 1:
ShowAmplitudeMenue() ;
ActiveDisplay = 1 ;
MenueItem = 2 ;
SetRFLevel(LACT, F_OUT);
break;
case 2:
// //////////////////////////////////////////////////////////////
// READ THE ROTARY ENCODER EVERY 1 ms
// Timer Interrupt does not work here
// //////////////////////////////////////////////////////////////
RE_xor = 0x00 ;
while (RE_xor == 0x00)
{
// WAITING FOR ACTION
CheckRE() ;
// delay(1) ;
}
RE_time0 = millis();
RE_one = RE_xor ;
delay(5);
// NOW WAIT FOR SOME MORE ACTION ...
RE_xor = 0x00 ;
while (RE_xor == 0x00)
{
CheckRE() ;
// delay(1) ;
}
RE_time1 = millis();
RE_two = RE_xor ;
// TIME DURATION
RE_time2 = RE_time1 - RE_time0 ;
PressedLong = false ;
if (RE_time2 > 999 ) PressedLong = true ;
// NOW EVALUATE
Serial.print("RE_one : ");Serial.println(RE_one);
Serial.print("RE_two : ");Serial.println(RE_two);
Serial.print("RE_time2 : ");Serial.println(RE_time2);
RE_eval = 0xFF ;
if ((RE_one == 0x1) & (RE_two == 0x2)) RE_eval = 0x1; // RIGHT
if ((RE_one == 0x2) & (RE_two == 0x1)) RE_eval = 0x0; // LEFT
if ((RE_one == 0x4) | (RE_two == 0x4)) RE_eval = 0x2; // PRESSED
// //////////////////////////////////////////////////////////////
// ROTATION = LEFT = -
// //////////////////////////////////////////////////////////////
if ((RE_eval == 0x0) && (ActiveDisplay == 0))
{
switch (CursorPosition)
{
case 0: // -1 GHZ
if (F_OUT > (F_OUT_MIN + 1E9)) F_OUT -= 1E9 ;
break;
case 1: // -100 MHz
if (F_OUT > (F_OUT_MIN + 1E8)) F_OUT -= 1E8 ;
break;
case 2: // -10 MHz
if (F_OUT > (F_OUT_MIN + 1E7)) F_OUT -= 1E7 ;
break;
case 3: // -1 MHz
if (F_OUT > (F_OUT_MIN + 1E6)) F_OUT -= 1E6 ;
break;
case 4: // -100 kHz
if (F_OUT > (F_OUT_MIN + 1E5)) F_OUT -= 1E5 ;
break;
case 5: // -10 kHz
if (F_OUT > (F_OUT_MIN + 1E4)) F_OUT -= 1E4 ;
break;
case 6: // -1 kHz
if (F_OUT > (F_OUT_MIN + 1E3)) F_OUT -= 1E3 ;
break;
case 7: // -100 Hz
if (F_OUT > (F_OUT_MIN + 1E2)) F_OUT -= 1E2 ;
break;
case 8: // -10 Hz
if (F_OUT > (F_OUT_MIN + 1E1)) F_OUT -= 1E1 ;
break;
case 9: // -1 Hz
if (F_OUT > (F_OUT_MIN + 1E0)) F_OUT -= 1E0 ;
break;
}
MenueItem = ActiveDisplay ;
}
// //////////////////////////////////////////////////////////////
// ROTATION = LEFT = -
// //////////////////////////////////////////////////////////////
if ((RE_eval == 0x0) && (ActiveDisplay == 1))
{
// DECREASE LEVEL
LACT -= 0.5 ;
if (LACT < AMPL_MIN) LACT = AMPL_MIN ;
MenueItem = ActiveDisplay ;
}
// //////////////////////////////////////////////////////////////
// ROTATION = RIGHT = +
// //////////////////////////////////////////////////////////////
if ((RE_eval == 0x1) && (ActiveDisplay == 0))
{
switch (CursorPosition)
{
case 0: // +1 GHZ
if (F_OUT < (F_OUT_MAX - 1E9)) F_OUT += 1E9 ;
break;
case 1: // +100 MHz
if (F_OUT < (F_OUT_MAX - 1E8)) F_OUT += 1E8 ;
break;
case 2: // +10 MHz
if (F_OUT < (F_OUT_MAX - 1E7)) F_OUT += 1E7 ;
break;
case 3: // +1 MHz
if (F_OUT < (F_OUT_MAX - 1E6)) F_OUT += 1E6 ;
break;
case 4: // +100 kHz
if (F_OUT < (F_OUT_MAX - 1E5)) F_OUT += 1E5 ;
break;
case 5: // +10 kHz
if (F_OUT < (F_OUT_MAX - 1E4)) F_OUT += 1E4 ;
break;
case 6: // +1 kHz
if (F_OUT < (F_OUT_MAX - 1E3)) F_OUT += 1E3 ;
break;
case 7: // +100 Hz
if (F_OUT < (F_OUT_MAX - 1E2)) F_OUT += 1E2 ;
break;
case 8: // +10 Hz
if (F_OUT < (F_OUT_MAX - 1E1)) F_OUT += 1E1 ;
break;
case 9: // +1 Hz
if (F_OUT < (F_OUT_MAX - 1E0)) F_OUT += 1E0 ;
break;
}
MenueItem = ActiveDisplay ;
}
// //////////////////////////////////////////////////////////////
// ROTATION = RIGHT = +
// //////////////////////////////////////////////////////////////
if ((RE_eval == 0x1) && (ActiveDisplay == 1))
{
// INCREASE LEVEL
LACT += 0.5 ;
if (LACT > AMPL_MAX) LACT = AMPL_MAX ;
MenueItem = ActiveDisplay ;
}
// //////////////////////////////////////////////////////////////
// ROTARY ENCODER WAS PRESSED
// //////////////////////////////////////////////////////////////
if (RE_eval == 0x2)
{
// CASE 1 : FREQUENCY MODE AND SHORT PRESS
if ((ActiveDisplay == 0) && !PressedLong)
{
// MOVE CURSOR ONE POSITION RIGHT
CursorPosition += 1;
if (CursorPosition > 9) CursorPosition = 0 ;
MenueItem = ActiveDisplay ;
}
// CASE 2 : FREQUENCY MODE AND LONG PRESS
else if ((ActiveDisplay == 0) && PressedLong)
{
// SWITCH TO AMPLITUDE MODE
ActiveDisplay = 1 ;
MenueItem = ActiveDisplay ;
}
// CASE 3 : AMPLITUDE MODE AND SHORT PRESS
else if ((ActiveDisplay == 1) && !PressedLong)
{
// NOTHING TO DO HERE
delay(1);
}
// CASE 4 : AMPLITUDE MODE AND LONG PRESS
else if ((ActiveDisplay == 1) && PressedLong)
{
// SWITCH TO FREQUENCY MODE
ActiveDisplay = 0 ;
MenueItem = ActiveDisplay ;
}
}
break;
default:
delay(1);
break;
}
}
void UpdateFreq( unsigned long long F_OUT)
{
// NOTE: SIMPLIFIED CALCULATIONS, AS F_MIN > 6.4 MHz,
// LSDIV IS ALWAYS 1, 0x00
if (F_OUT < F_OUT_MIN) F_OUT = F_OUT_MIN ;
if (F_OUT > F_OUT_MAX) F_OUT = F_OUT_MAX ;
FREQ = (float)F_OUT ;
byte Aux = 0x00 ;
unsigned long HSDIV ;
unsigned long XTAL = 152600000 ; // Hz
double FBDIV ;
unsigned long INTEGER ;
unsigned long long FRACTION ;
unsigned long long F_VCO ;
FBDIV = (double)(F_VCO_MIN * 1.0 / F_OUT );
HSDIV = (int)(FBDIV + 0.5) ;
if ((HSDIV > 32) && (HSDIV % 2)) HSDIV += 1 ;
// MIN MAX VALUE
if (HSDIV < 4) HSDIV = 4 ;
if (HSDIV > 2046) HSDIV = 2046 ;
F_VCO = HSDIV * F_OUT ;
FBDIV = (double)(F_VCO * 1.0 / XTAL) ;
INTEGER = FBDIV ; // FLOOR :-)
FRACTION = 4294967295.0 * (double)(FBDIV - INTEGER) ;
// Get Device Ready for Update
// Set page register to point to page 0
Si564_Write_Byte( 255, 0x00) ;
// Disable FCAL override
Si564_Write_Byte( 69, 0x00) ;
// Synchronously disable output
Si564_Write_Byte( 17, 0x00) ;
// HSDIV [7:0]
Aux = HSDIV & 0xFF ;
Si564_Write_Byte( 23, Aux) ;
// LSDIV[2:0]; HSDIV[10:8]
Aux = (HSDIV >> 8) & 0x07 ;
Si564_Write_Byte( 24, Aux) ;
// FBDIV [7:0]
Aux = FRACTION & 0xFF ;
Si564_Write_Byte( 26, Aux) ;
// FBDIV [15:8]
Aux = (FRACTION >> 8 ) & 0xFF ;
Si564_Write_Byte( 27, Aux) ;
// FBDIV [23:16]
Aux = (FRACTION >> 16 ) & 0xFF ;
Si564_Write_Byte( 28, Aux) ;
// FBDIV [31:24]
Aux = (FRACTION >> 24 ) & 0xFF ;
Si564_Write_Byte( 29, Aux) ;
// FBDIV [39:32]
Aux = INTEGER & 0xFF ;
Si564_Write_Byte( 30, Aux) ;
// FBDIV [42:40]
Aux = (INTEGER >> 8 ) & 0x07 ;
Si564_Write_Byte( 31, Aux) ;
// Start FCAL using new divider values
Si564_Write_Byte( 7, 0x08) ;
// Synchronously enable output
Si564_Write_Byte( 17, 0x01) ;
}
void Si564_Write_Byte( byte Register, byte Value)
{
byte Error = 0x00 ;
Wire1.beginTransmission(Si564_Address);
Wire1.write(Register);
Wire1.write(Value);
Error = Wire1.endTransmission();
SerialHexOutput(Value) ;
/*
switch (Error)
{
case 0 : Serial.println("0:success");
break;
case 1 : Serial.println("1:data too long to fit in transmit buffer");
break;
case 2 : Serial.println("2:received NACK on transmit of address");
break;
case 3 : Serial.println("3:received NACK on transmit of data");
break;
case 4 : Serial.println("4:other error");
break;
}
*/
}
void SerialHexOutput(byte value)
{
Serial.print("0x");
if (value < 0x10) Serial.print("0");
Serial.println(value,HEX);
}
// /////////////////////////////////////////////////////////////////////
// SUBROUTINES DISPLAY.
// /////////////////////////////////////////////////////////////////////
void ShowFrequencyMenue ()
{
char str[20];
sprintf(str, "%10lld", F_OUT);
int len=strlen(str);
int offset = 0;
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(2);
display.setCursor(0,0);
display.println("FREQUENCY");
for (int i=0; i<10; i++)
{
if (i>=0) offset = 0;
if (i>=1) offset = 5;
if (i>=4) offset = 10;
if (i>=7) offset = 15;
display.setTextColor(WHITE);
display.setCursor(i*11+offset,20);
if (i<10-len) display.print(" ");
else display.print(str[i]);
if ((ShowCursor) && (CursorPosition == i))
{
display.setCursor(i*11+offset,26);
display.print("_");
}
}
ShowInfo();
display.display();
}
void ShowAmplitudeMenue ()
{
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(2);
display.setCursor(0,0);
display.println("AMPLITUDE");
display.setCursor(0,20);
if (LACT > 0.0) display.print("+");
if (LACT == 0.0) display.print(" ");
display.print(LACT,1);
display.print(" dBm ");
ShowInfo();
display.display();
}
void ShowInfo()
{
display.drawLine(0, 40, 128, 40, WHITE);
display.setTextSize(1);
display.setCursor(0,46);
display.println("PRESS TO MOVE RIGHT");
display.setCursor(0,57);
display.print("ROTATE TO INC/DEC");
}
// CHECK ROTARY ENCODER
void CheckRE()
{
// RE_old = RE_now ;
RE_old = (digitalRead(RE2) << 2)|(digitalRead(RE1) << 1)|digitalRead(RE0);
delay(2);
RE_now = (digitalRead(RE2) << 2)|(digitalRead(RE1) << 1)|digitalRead(RE0);
RE_xor = RE_now ^ RE_old ;
}
// /////////////////////////////////////////////////////////////////////
// SUBROUTINES ATTENUATOR.
// /////////////////////////////////////////////////////////////////////
void SetRFLevel(float Level, unsigned long long FREQ)
{
unsigned int value ;
byte index = FREQ / 100000000 ;
float CAL_ATT = CAL[index] ;
if (Level < AMPL_MIN) Level = AMPL_MIN ;
if (Level > AMPL_MAX) Level = AMPL_MAX ;
// YES, WE HEARD OF THIS THING CALLED "INTERPOLATION"
float NecessaryAttenuation = CAL_ATT + (AMPL_MAX - Level);
value = 64 - 2.0 * NecessaryAttenuation ;
Serial.print("ATT: ");
Serial.print(NecessaryAttenuation,2);
Serial.print(" ... ");
Serial.println(value,BIN);
digitalWrite(LE, LOW);
shiftOut(DAT, CLK, MSBFIRST, value);
digitalWrite(LE, HIGH);
}
// /////////////////////////////////////////////////////////////
// END OF FILE.
// /////////////////////////////////////////////////////////////
✈ Credits • Note of Thanks
We would like to thank the staff of Computer Controls AG (Switzerland) for their efforts to supply us
(our research group at ETH zürich)
with free samples.
ขอขอบพระคุณทุกท่าน.
ขอขอบพระคุณทุกท่าน.
Better than Birthday and Christmas together :-)
✈ YAT • Yet another Note
This project uses the Arduino™ / Genuino™ DUE. First it offers 3.3 V Logic to easily talk to the Si564, second it offers
64-Bit calculations, which make life easier, when dealing with numbers larger than 4294967296 (2^32). If the minimum
Frequency is larger than approx. 6.4 MHz the LSDIV needs not to be calculated and can be kept at a value of 1 (0x00).
As we use an amplifier which is biased by an
TCBT-14+ a lower cut-off frequency of 10 MHz is suggested.
As the FR4 degrades much above 2 GHz and the delivered power by the Si-564 also reduces with increased frequency, we added an external amplifier (ZX60-43-S+, Low Current Amplifier, 0.5 MHz to 4 GHz) to get an almost frequency independent amplitude response.
Even so the datasheet says "provides any frequency from 0.2 to 3000 MHz", we detected a gap from 2.624 - 2.7 GHz (13.12 GHz / 5 and 10.8 GHz / 4) which is caused by the (too small) vco span resulting in non-overlapping sub-ranges.
As the FR4 degrades much above 2 GHz and the delivered power by the Si-564 also reduces with increased frequency, we added an external amplifier (ZX60-43-S+, Low Current Amplifier, 0.5 MHz to 4 GHz) to get an almost frequency independent amplitude response.
Even so the datasheet says "provides any frequency from 0.2 to 3000 MHz", we detected a gap from 2.624 - 2.7 GHz (13.12 GHz / 5 and 10.8 GHz / 4) which is caused by the (too small) vco span resulting in non-overlapping sub-ranges.
✈ Share your thoughts
The webmaster does not read these comments regularely. Urgent questions should be send via email.
Ads or links to completely uncorrelated things will be removed.
|
t1 = 7319 d
t2 = 420 ms |
★ ★ ★ Copyright © 2006 - 2026 by changpuak.ch ★ ★ ★
|

|